




Бренд
SGWRDМодель
GMSL/GMSL2 RepeaterРазъем
Fakra Z typeРазмеры
L:87.5mm, W: 70.6mm, H:20mmМасса
<150gСтандартный
GMSL/GMSL2Рабочая температура
-40~+85℃
GMSL-ретранслятор
Повторитель GMSL2 может реализовать один вход GMSL2 и один выход GMSL2, чтобы увеличить дальность передачи.
Диаграмма▼
Мы можем предоставить камеру + коаксиальный кабель

Спецификация▼

Для получения более подробной информации, пожалуйста, нажмите, чтобы отправить нам электронное письмо
- Коаксиальный кабель
| Название продукта | Спецификация | Картина |
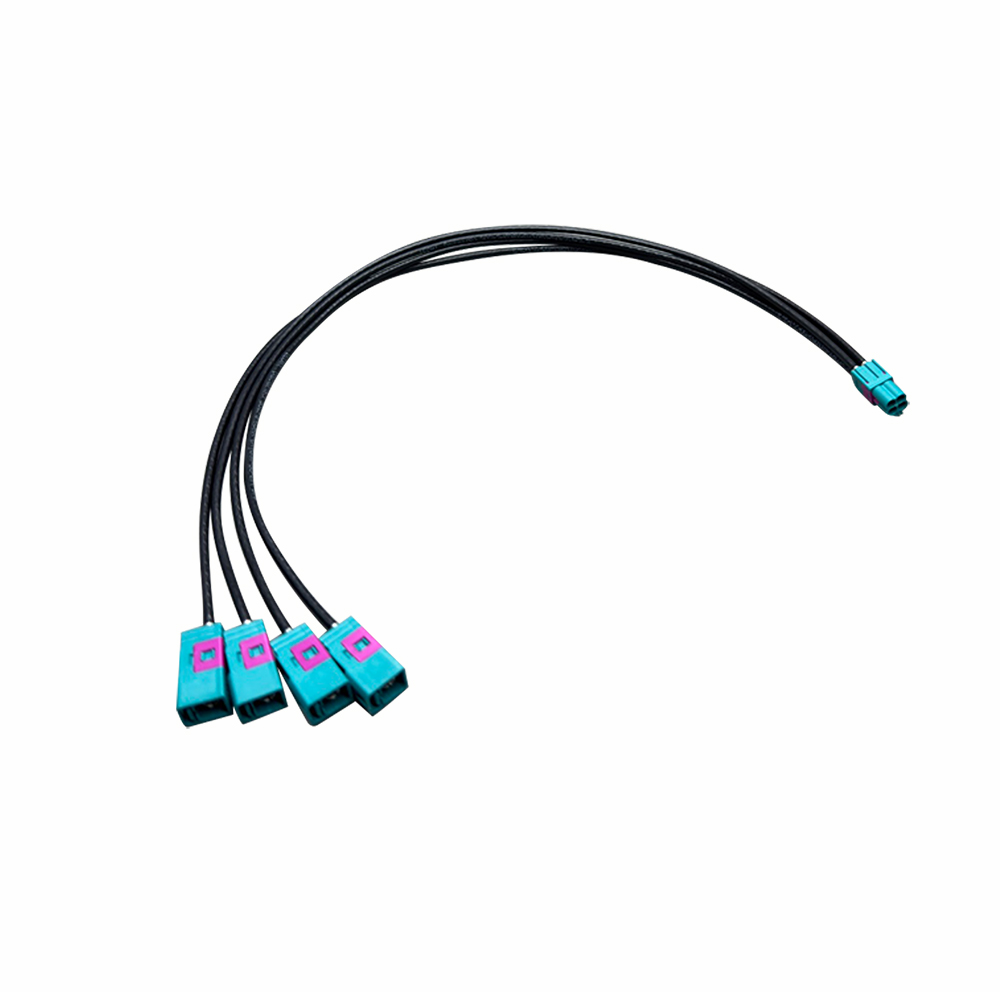
Коаксиальный кабель Mini-Fakra с двойным гнездом 4-в-1
|
|
 |
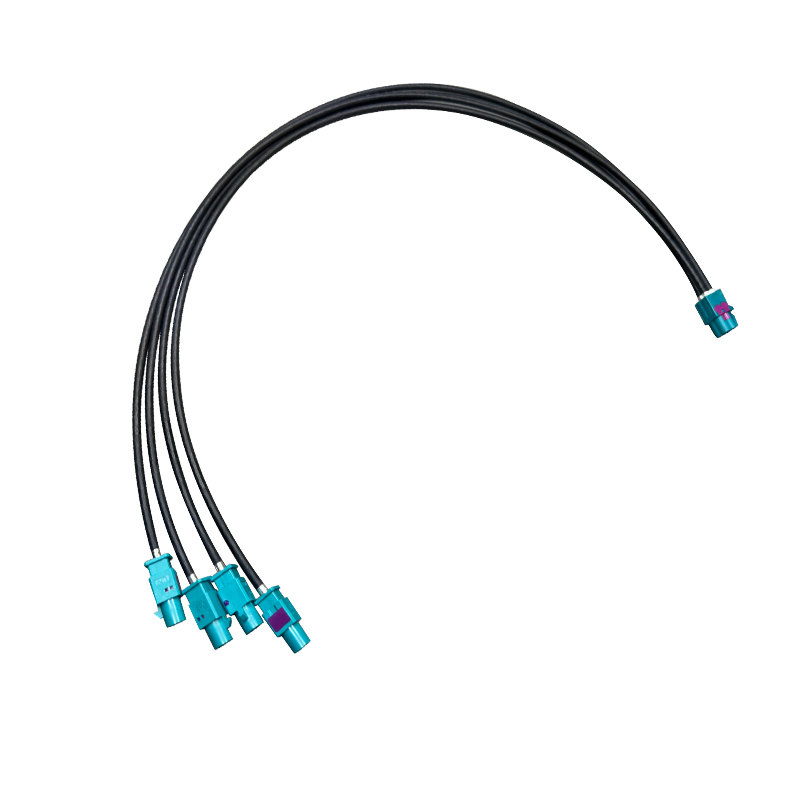
Мужской и женский коаксиальный кабель Mini-fakra 4-в-1
|
|
 |
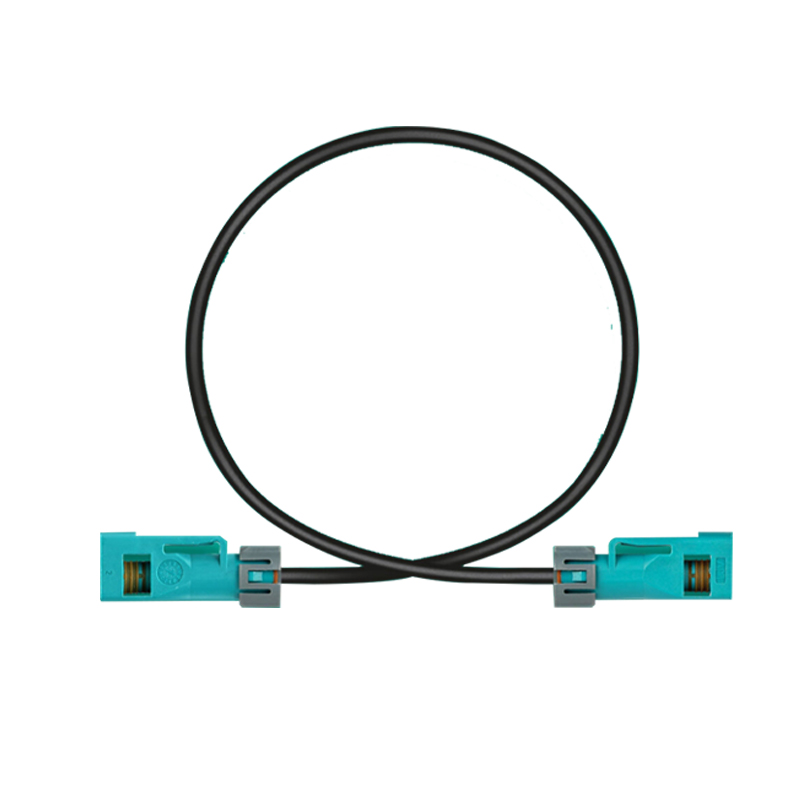
Коаксиальный кабель камеры с двойной розеткой
|
|
 |
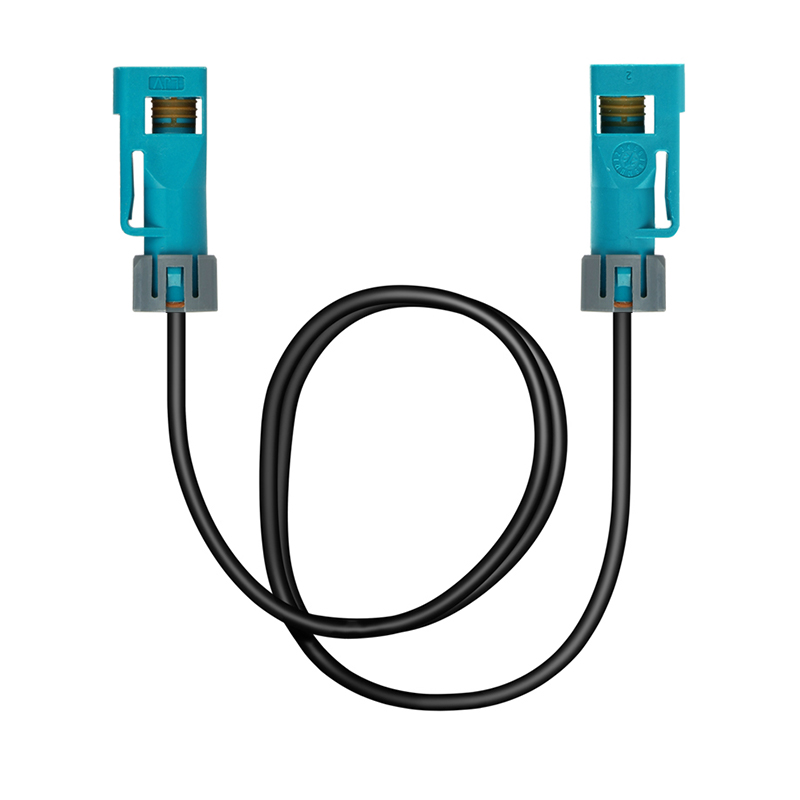
Коаксиальный кабель для мужской и женской камеры
|
|
 |

2,6 МП AR0233 с камерой ISP GMSL2 Обзор Модуль камеры SG2-AR0233C-5200-G2A-Hxxx оснащен CMOS-датчиком изображения ONSEMI AR0233 и Maxim GMSL2. Он оснащен датчиком автомобильного класса с хорошо настроенным процессором сигналов изображения (ISP), обеспечивающим исключительное качество изображения, корпусом со степенью защиты IP67 и объективом M12, который фокусируется и приклеивается на нашем заводе. Продукт по умолчанию 1. Статус доставки этого продукта по умолчанию — фиксированные линзы, и пользователям не нужно самостоятельно фокусировать или заменять линзы. Если вам необходимо заменить линзу самостоятельно, пожалуйста, сделайте пометку при оформлении заказа. После замены объектива качество изображения выходит за рамки обслуживания. 2. При выходе с завода камера по умолчанию не откалибрована. Если необходимо откалибровать внутренние параметры камеры и записать их в память камеры, сделайте это примечание при оформлении заказа. Комплекты разработки/захвата Плата адаптера/решение для изображения Комплект разработчика адаптации /выходной интерфейс Максимальное количество камеры подключены Картина SG8A-ORIN-GMSL2 Плата адаптера NVIDIA Jetson AGX Орин/AGX КсавьерКомплект разработчика 8 Конвертер камеры SerDes в USB СГ8-У30-ГМСЛ2 NVIDIA Джетсон Орин Нано/NX Комплект разработчика Платформа ARM/компьютерная/промышленная компьютер/интерфейс USB3.0 1 Совместимость с протоколом UVC, обеспечивающая программное обеспечение для сбора данных с верхнего уровня компьютера. Карта захвата CoaxCapture II GMSL ПК/IPC/PCIe3.0 8 Если вам нужна соответствующая поддержка в разработке, свяжитесь с Sales@sensing-world.com. Функции 1. Выходной формат: несжатый формат YUV422. 2. Объектив, соответствующий стандарту S-mount IP67, сфокусирован и приклеен на нашем заводе. 3. Поддержка синхронизации нескольких камер. 4. Поддержка объективов с различным фокусным расстоянием. 5. ФКК, КЭ и РоХС Приложение 1. Автомобильная промышленность 2. ADAS + просмотр Fusion 3. Визуализация с высоким динамическим диапазоном 4. Автономное вождение 5. Роботы
Читать далее
Камера 8,3 МП OX08D10 GMSL2 Обзор Модуль камеры SG8-OX08DC-G2A-Hxxx оснащен CMOS-датчиком изображения OMNIVSION OX08D10 и Maxim GMSL2 (MAX9295A). Он имеет датчик автомобильного класса, который поставляется в корпусе со степенью защиты IP67 и поставляется с объективом AA, который фокусируется и склеены на нашем заводе. Продукт по умолчанию 1. Статус доставки этого продукта по умолчанию — фиксированные линзы, и пользователям не нужно самостоятельно фокусировать или заменять линзы. Если вам необходимо заменить линзу самостоятельно, пожалуйста, сделайте пометку при оформлении заказа. После замены объектива качество изображения выходит за рамки обслуживания. 2. При выходе с завода камера по умолчанию не откалибрована. Если необходимо откалибровать внутренние параметры камеры и записать их в память камеры, сделайте это примечание при оформлении заказа. Функции 1. Выходной формат: несжатый формат RAW. 2. Объектив с креплением AA/S, соответствующий требованиям IP67, сфокусированный и приклеенный на нашем заводе. 3. Поддержка синхронизации нескольких камер. 4. Поддержка объективов с различным фокусным расстоянием. 5. Поддержка внешнего триггера Приложение 1. Автомобильная промышленность 2. ADAS + просмотр Fusion 3. Визуализация с высоким динамическим диапазоном 4. Автономное вождение 5. Роботы
Читать далее
3-мегапиксельная камера OX03J10 с камерой ISP GMSL2 Обзор Модуль камеры SG3S-OX03JC-G2F-Hxxx оснащен OMNIVISION OX03J10 и сериализатором Maxim GMSL2 MAX96717F. Он оснащен датчиком автомобильного класса с хорошо настроенным процессором сигналов изображения (ISP), обеспечивающим исключительное качество изображения, корпусом со степенью защиты IP67 и объективом M12, который фокусируется и приклеивается на нашем заводе. Продукт по умолчанию 1. Статус доставки этого продукта по умолчанию — фиксированные линзы, и пользователям не нужно самостоятельно фокусировать или заменять линзы. Если вам необходимо заменить линзу самостоятельно, пожалуйста, сделайте пометку при оформлении заказа. После замены объектива качество изображения выходит за рамки обслуживания. 2. При выходе с завода камера по умолчанию не откалибрована. Если необходимо откалибровать внутренние параметры камеры и записать их в память камеры, сделайте это примечание при оформлении заказа. Комплекты разработки/захвата Плата адаптера/решение для изображения Комплект разработчика адаптации/интерфейс вывода Максимальное количество подключенных камер Картина SG8A-ORIN-GMSL2 Плата адаптера NVIDIA Jetson AGX Орин/AGX КсавьерКомплект разработчика 8 Конвертер камеры SerDes в USB SG8-U30-GMSL2 Комплект разработчика NVIDIA Jetson Orin Nano/NXПлатформа ARM/компьютер/промышленный компьютер/интерфейс USB3.0 1 Карта захвата CoaxCapture II GMSL ПК/IPC/PCIe3.0 8 Если вам нужна соответствующая поддержка в разработке, свяжитесь с Sales@sensing-world.com. Функции 1. Выходной формат: несжатый формат YUV422. 2. Объектив, соответствующий стандарту S-mount IP67, сфокусирован и приклеен на нашем заводе. 3. Поддержка внешнего триггера 4. Поддержка синхронизации нескольких камер. 5. Поддержка объективов с различным фокусным расстоянием. 6. ФКК, КЭ и РоХС Приложение 1. Автомобильная промышленность 2. ADAS + просмотр Fusion 3. Визуализация с высоким динамическим диапазоном 4. Автономное вождение 5. Роботы
Читать далее
- Длина 2 ~ 20 метров - Двойной гнездовой интерфейс - IP67 Водонепроницаемый
Читать далее
SGWRD стремится предоставлять высококачественные продукты и решения для обработки изображений для различных сложных приложений искусственного интеллекта.

 Поддерживается сеть IPv6
Поддерживается сеть IPv6
 русский
русский English
English Deutsch
Deutsch русский
русский español
español 日本語
日本語




